Choisissez le fuseau horaire
Le fuseau horaire de votre profil:
![]()
The goal of this RAMP is to detect Mars craters in satellite images.
Impact craters in planetary science are used to date planetary surfaces, to characterize surface processes and to study the upper crust of terrestrial bodies in our Solar System (Melosh, 1989). Thanks to the Martian crater morphology, a wide amount of information could be deduced on the geological history of Mars, as for example the evolution of the surface erosion rate, the presence of liquid water in the past, the volcanic episodes or the volatiles layer in the subsurface (Carr & Head, 2010). These studies are widely facilitated by the availability of reference crater databases.
Surveying impact craters is therefore an important task which traditionally has been achieved by means of visual inspection of images. The enormous number of craters smaller than one kilometer in diameter, present on high resolution images, makes visual counting of such craters impractical. In order to overcome this problem, several algorithms have been developed to automatically detect impact structures on planetary images (Bandeira et al., 2007 ; Martins et al., 2009). Nevertheless, these method allow to detect only 70-80 % of craters (Urbach & Stepinski, 2009).
This challenge proposes to design the best algorithm using a collaboration strategy to detect crater position and size starting from the most complete Martian crater database containing 384 584 verified impact structures larger than one kilometer of diameter (Lagain et al. 2017). We propose to give to the users a subset of this large dataset in order to test and calibrate their algorithm. We provide THEMIS nightime dataset (Christensen et al., 2003), already projected to avoïd distortion, sampled at various scales and positions in form 112x112 pixels images. Using an appropriate metric, we will compare the true solution to the estimation. The goal is to provide detection of more than 90% (crater center and diameter) with a minimum number of wrong detection.
Formally, each instance will consist of a small square image patch, embedded into a larger square image patch. To capture craters of highly varying sizes, we will have patches at three different scales. The training set will contain image patches and ground truth: a set of three-tuples (x, y, r).
You will need to output a list of disk centers (x, y) and radii r. We will score you on all craters that are contained completely in the larger image patch and intersect with the smaller image patch, using a score which combines detection accuracy (is a crater detected?) and precision (how well you estimate (x, y) and r).
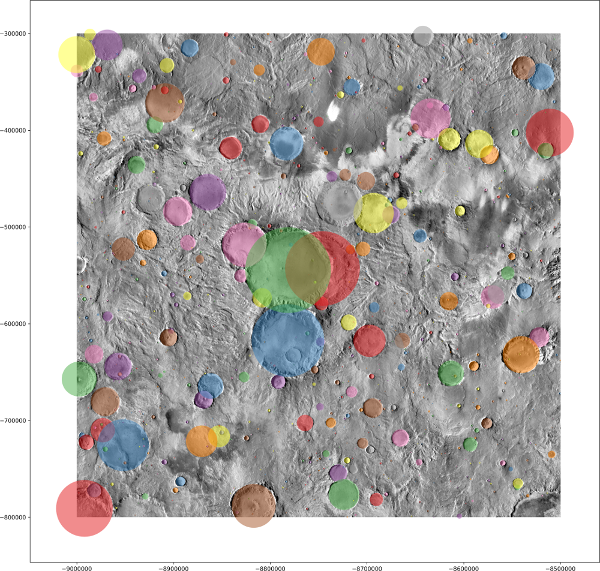
The following image illustrates the data. It is a larger region, image patches will be smaller, typically 112x112 pixel (small patch) and 224x224 (larger patch).
Participants can be either present physically at Proto204 (Orsay) or can participate remotely via the web interface.
References :
Bandeira, L.; Saraiva, J. & Pina, P., Impact Crater Recognition on Mars Based on a Probability Volume Created by Template Matching, IEEE Transactions on Geoscience and Remote Sensing, Institute of Electrical and Electronics Engineers (IEEE), 2007, 45, 4008-4015
Carr, M. H. and Head, J. W. III. (2010) Geologic history of Mars. Earth and Planetary Science Letters, 294, 185-203.
Christensen, P. R.; Bandfield, J. L.; Bell, J. F.; Gorelick, N.; Hamilton, V. E.; Ivanov, A.; Jakosky, B. M.; Kieffer, H. H.; Lane, M. D.; Malin, M. C.; McConnochie, T.; McEwen, A. S.; McSween, H. Y.; Mehall, G. L.; Moersch, J. E.; Nealson, K. H.; Rice, J. W.; Richardson, M. I.; Ruff, S. W.; Smith, M. D.; Titus, T. N. & Wyatt, M. B., Morphology and Composition of the Surface of Mars: Mars Odyssey THEMIS Results, Science, 2003, 300, 2056-2061
Lagain, A., Marmo, C., Delaa, O., Bouley, S., Baratoux, D., Costard, F. et al. (2017) Martian crater database: 1. Reviewing and adapting to surface ages measurement. Submission to the Journal of Geophysical Research planned to November 2017.
Martins, R.; Pina, P.; Marques, J.S & Silveira, M., Crater Detection by a Boosting Approach, IEEE Geoscience and Remote Sensing Letters, Institute of Electrical and Electronics Engineers (IEEE), 2009, 6, 127-131
Melosh, H. J. (1989) Impact cratering: a geologic process. Oxford University Press.
Urbach, E. and Stepinski, T. (2009) Automatic detection of sub-km craters in high resolution planetary images. Planetary and Space Science, 57, 880-887.